
搜索结果: 31-45 共查到“知识要闻 机器人控制”相关记录720条 . 查询时间(5.901 秒)

南方科技大学机械与能源工程系付成龙教授荣获中国自动化学会(CAA)科技进步二等奖(图)
付成龙 自动化学会 CAA 科技进步 协同感知 健康服务 机器人
font style='font-size:12px;'>
2023/11/30
近日,2022年度中国自动化学会科学技术奖颁奖典礼于广州南沙举办。南方科技大学牵头申报的“面向健康服务的人机物理协同感知与控制关键技术及应用”成果荣获中国自动化学会(CAA)科技进步二等奖。

中国科学院深圳先进技术研究院机器人平台加速银纳米晶的高通量研究(图)
机器人 银纳米晶 光学仿真
font style='font-size:12px;'>
2023/8/6
2023年6月6日,中国科学院深圳先进技术研究院材料所喻学锋、赵海涛团队在国际学术期刊《化学工程杂志》Chemical Engineering Journal 上发表题为“Robotic platform for accelerating the high-throughput study of silver nanocrystals in sensitive/selective Hg2+ det...

中国矿业大学计算机科学与技术学院学子在第十届中国工程机器人大赛暨国际公开赛中喜获佳绩(图)
工程机器人 国际公开赛 机器人
font style='font-size:12px;'>
2024/3/6
2023年5月19日-21日,第十届中国工程机器人大赛暨国际公开赛在安徽芜湖举办。中国矿业大学计算机学院王冠军、孙统风副教授带队指导的ROBOX机器人俱乐部6支队伍,在竞赛中取得了全国二等奖4项、三等奖2项的好成绩。

全国科技活动周丨第五届中国机器人技能大赛暨机器人创新与实践论坛在宁举行(图)
科技活动周 机器人 技能大赛
font style='font-size:12px;'>
2023/11/12
2023年5月19日至21日,在第七个全国科技工作者日来临之际,第五届中国机器人技能大赛暨机器人创新与实践论坛在南京工业大学落下帷幕。天津大学、中国人民解放军陆军工程大学、南京工业大学等10所院校14支参赛队伍喜获冠军。
中国科学院深圳先进技术研究院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
仿鱼 磁驱动机器人 复杂运动 学习控制方法
font style='font-size:12px;'>
2023/5/18
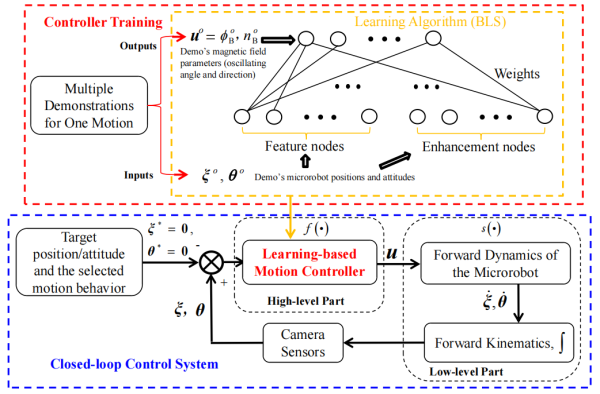
近日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Method Using ...

中国科学院深圳先进院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
微型仿鱼 磁驱动机器
font style='font-size:12px;'>
2023/5/31
2023年5月18日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Metho...

中国科学院自动化研究所等联合孵化的新能源矿山智能运载机器人“载山CarMo”正式发布并已投入使用(图)
新能源矿山 智能运载机器人 “载山CarMo”
font style='font-size:12px;'>
2023/5/22
智能矿山无人化是中国无人驾驶技术应用的重要场景之一,对实现矿山减人增安提效、促进能源绿色低碳转型有着重要意义。近日,中国科学院自动化研究所、国际先进技术应用推进中心、中国矿业大学(北京)内蒙古研究院、中科慧拓联合孵化的矿山智能运载机器人“载山CarMo”在内蒙古鄂尔多斯正式发布。据现有公开报道,这是我国首台套具备产业化标准要求的、具备完全自主知识产权的新能源运载装备。

中科院深圳先进院提出磁控仿鱼微型机器人复杂运动(图)
磁控仿鱼 微型机器人 非线性
font style='font-size:12px;'>
2023/8/6
2023年5月10日,来自中国科学院深圳先进技术研究院集成所智能仿生研究中心的徐升和徐天添研究团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,并且本方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。
论文题目:数据驱动优化的刚软混杂机器人视觉伺服控制研究。答辩人:何邵颖。时间:2023年05月17日9:00。关键词:刚软混杂机器人,数据驱动优化,视觉伺服,输入映射补偿,模型预测控制。
自动焊机器人工作站首次落地田湾核电
自动焊机器人 工作站 田湾核电
font style='font-size:12px;'>
2023/5/25
近日,中国核工业二三建设有限公司连云港项目部与中核设计焊接研究所共同研制的全系列风管预制自动焊机器人工作站首次在田湾核电7、8号机组成功落地应用。

近日,由华为公司主办的2023第九届华为软件精英挑战赛――“普朗克计划”全球总决赛及颁奖典礼于2023年4月22日-23日在广东东莞、深圳举行。总决赛共有9支队伍获得奖项,杭州电子科技大学计算机学院代表队在激烈角逐中斩获一个季军和“最优美代码奖”。

华南理工大学张智军教授做客湖南师范大学信息学院智能计算与语言信息处理重点实验室(图)
华南理工 张智军 湖南师范 智能计算 语言信息处理 神经网络 智能机器人
font style='font-size:12px;'>
2023/5/11
2023年4月17日上午,应湖南师范大学信息科学与工程学院智能计算与语言信息处理重点实验室邀请,华南理工大学张智军教授在中和楼342报告厅进行了主题为“变参递归神经网络及其在智能机器人中的应用”的学术报告,本次报告由信息科学与工程学院院长、省重点实验室主任代建华教授和副院长肖林教授主持,科研办组织召开,2020级、2021级和2022级研究生及相关老师参加。
上海交通大学自动化系博士生预答辩信息:王光明
机器人感知 机器人定位 自监督学习 高效点云学习
font style='font-size:12px;'>
2023/5/10
论文题目:室外复杂场景下的移动机器人感知与定位。答辩人:王光明。时间:2023年04月06日13:30。关键词:机器人感知,机器人定位,自监督学习,高效点云学习。

第十五届国际先进机器人及仿真技术大赛现场赛圆满结束(图)
机器人 仿真 人工智能 太仓
font style='font-size:12px;'>
2023/11/12
第十五届国际先进机器人及仿真技术大赛,由于疫情原因,大部分赛项于11月份转为线上举办了。由于比赛环境、比赛方式而无法在线上举办的比赛,于2023年3月25日在太仓举办了第十五届大赛的现场赛。