
搜索结果: 106-120 共查到“知识要闻 机器人控制”相关记录720条 . 查询时间(1.562 秒)

中国科学院沈阳自动化研究所飞行机器人团队荣获2021中国自动化学会科普奖(图)
飞行机器人 CAA科普奖 科技创新 科学普及
font style='font-size:12px;'>
2022/4/29
2022年4月,中国自动化学会(CAA)发布了CAA科普奖评审结果公告,中国科学院沈阳自动化研究所机器人学研究室自主机器人课题组何玉庆研究员团队“飞行机器人科普:科学普及与科技创新融合模式探索”项目荣获2021年度CAA科普奖,这也是沈阳自动化所首次获得该奖项。该奖项内容由国家重点研发计划“智能机器人专项”“高海拔环境科考站辅助值守机器人”资助。 CAA科普奖旨在鼓励自主创新,鼓励学科科普教育、科...
关于举办中南民族大学“新思路杯”全国机器人大赛及人工智能大赛通知
中南民族大学 新思路杯 全国机器人大赛 人工智能大赛
font style='font-size:12px;'>
2023/1/17
中国机器人及人工智能大赛是一项历史悠久、影响广泛的全国性学科竞赛。作为中国人工智能学会最早主办的竞赛之一,大赛已为我国培养了大量“能动手”、“敢创新”、“善协作”的复合型人才。大赛已列入中国高等教育学会发布的《2020年全国普通高等学校学科竞赛排行榜》《2021年全国普通高校大学生竞赛分析报告》。
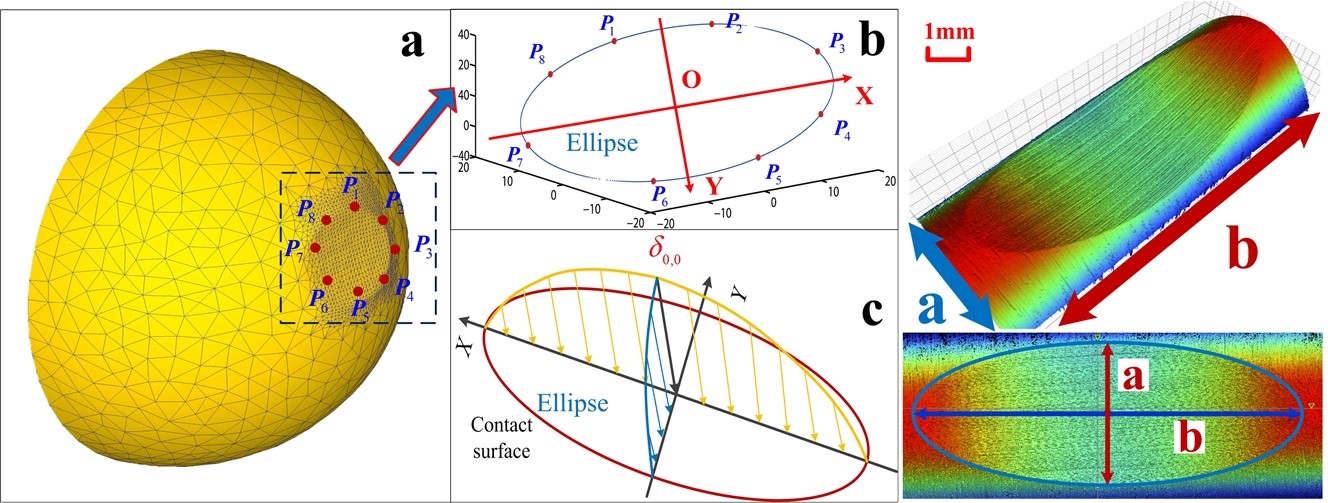
中国科学院沈阳自动化研究所机器人自动化航空叶片磨抛加工研究取得进展(图)
航空发动机叶片 机器人自动化叶片磨抛加工 工业机器人技术
font style='font-size:12px;'>
2022/4/29
2022年4月,中国科学院沈阳自动化研究所在机器人自动化航空叶片磨抛加工领域取得新进展,提出了一种非线性材料去除深度理论模型,实现了机器人自动化航空叶片磨抛加工过程中的逐点精准材料去除控制策略。该研究成果于2022年发表在制造领域权威期刊Journal of Manufacturing Processes。航空发动机是飞机制造的关键部件,而航空发动机叶片是航空发动机的重要组成部分。在发动机运行过程...

南开大学人工智能学院孙宁教授荣获ICCAR青年科学家奖(图)
南开大学人工智能学院 孙宁 ICCAR 青年科学家奖 控制 自动化 机器人
font style='font-size:12px;'>
2022/5/17
2022年4月8日至10日,第八届控制、自动化和机器人国际会议(International Conference on Control, Automation and Robotics,简称ICCAR)线上召开。大会设置了青年科学家奖(Young Scientist Award)、最佳论文奖(Best Paper Award)、最佳报告奖(Best Presentation Award)。在大会闭...

中国科学院沈阳自动化研究所牵头制定的机器人领域互联互通和互操作国家标准正式发布(图)
机器人 数字化车间 机器人产业发展
font style='font-size:12px;'>
2022/4/29
2022年3月9日,由中国科学院沈阳自动化研究所牵头制定的“机器人制造数字化车间装备互联互通和互操作规范”正式发布,成为我国国家标准(国家标准编号为GB/T 41256-2022),并将于2022年10月1日出版实施。“机器人制造数字化车间装备互联互通和互操作规范”规定了机器人制造数字化车间的系统组成、通用要求及互联互通互操作要求。标准从系统组成、网络架构、交互数据三个层面进行统一描述,以指导机器...

中国科学院沈阳自动化研究所在连续体机器人形状感知研究方面取得进展(图)
连续体 机器人 形状感知 腔镜手术机器人
font style='font-size:12px;'>
2022/9/22
近日,中国科学院沈阳自动化研究所智能腔镜手术机器人研究组在连续体机器人形状感知方面研究取得新进展。相关成果发表在机器人领域期刊IEEE Robotics and Automation Letters上。

中国科学院理化技术研究所飞秒激光直写3D仿生响应型水凝胶微致动器研究获进展(图)
飞秒激光 3D仿生 水凝胶微致动器
font style='font-size:12px;'>
2022/9/22
受自然界的启发,基于刺激响应行为的响应型水凝胶致动器在软体机器人、柔性电子、生物医学等领域得到广泛关注。水凝胶微致动器在显微操作、微机器人、微流体、智能传感器等领域的应用颇为重要。然而,实现水凝胶微致动器在微纳尺度上的精确制备及可控操纵颇具挑战性。

浙江大学控制科学与工程学院FAST实验室研究工作被机器人顶级期刊IEEE TRO录用(图)
多旋翼空中机器人 自主导航 自主跟踪 极限飞行 高速导航和视觉遥操作
font style='font-size:12px;'>
2022/5/20
2022年4月,控制学院FAST实验室关于多旋翼空中机器人运动规划的研究工作“Geometrically Constrained Trajectory Optimization for Multicopters”被机器人领域顶级期刊IEEE Transactions on Robotics(TRO)录用。该文章第一作者为浙江大学控制科学与工程学院博士生汪哲培,通讯作者高飞、许超。

东南大学仪器科学与工程学院三十周年院庆系列学术报告第十一场成功举办(图)
微型机器人 仿生智能感知 仿生导航
font style='font-size:12px;'>
2022/9/19
2022年4月11日晚8点,东南大学仪器科学与工程学院三十周年院庆系列学术报告迎来第十一场次,本次报告邀请到了香港城市大学生物医学工程系副教授、国家自然科学基金委员会优秀青年科学基金获得者申亚京副教授,带来了主题为“面向生物医学工程的仿生微型机器人及系统”的精彩报告。
关于发布共融机器人基础理论与关键技术研究重大研究计划2022年度项目指南的通告
共融机器人 分布式机器人 机器人技术 机器人助老护理
font style='font-size:12px;'>
2022/4/22
共融机器人是指能够与作业环境、人和其他机器人自然交互、自主适应复杂动态环境并协同作业的机器人。共融机器人在结构、感知和控制方面的基本特征是:柔顺灵巧的结构;多模态感知的功能;分布自主、协同作业的能力。本重大研究计划面向智能制造、医疗康复等领域对共融机器人的需求,重点开展共融机器人结构、感知与控制的基础理论与关键技术研究,为我国机器人技术和产业取得源头创新成果提供科学支撑。

东南大学仪器科学与工程学院三十周年院庆系列学术报告第九场成功举办(图)
手术机器人 智能算法 穿刺介入
font style='font-size:12px;'>
2022/9/19
2022年4月6日晚20:30,东南大学仪器科学与工程学院举办了三十周年院庆系列学术报告第九场次,本次邀请到了珠海横乐医学科技有限公司CTO王澄分享新型介入手术与智能穿刺手术机器人相关科研成果。
第十五届先进机器人及仿真技术大赛即将开始报名(图)
第十五届 机器人 仿真技术
font style='font-size:12px;'>
2022/12/31
近日,中国仿真学会正式发布了"关于举办第十五届国际先进机器人及仿真技术大赛的通知",相关报名工作将在2022年4月1日起正式开始。

中国科学院深圳先进技术研究院多个磁驱动软体微型机器人的独立控制(图)
磁驱动 微型机器人 智能仿生
font style='font-size:12px;'>
2023/8/9
2022年3月29日,中国科学院深圳先进技术研究院集成所智能仿生中心团队在微型机器人领域取得新进展。针对相同磁场下多个磁驱动软体微型机器人接收相同磁场而难以独立控制的问题,团队提出了一种完全解耦的多磁驱动软体微型机器人独立控制策略,首次实现了4个磁性软体微型机器人的独立位置控制和3个磁性软体微型机器人的独立路径跟随控制。
国产机器人用于冠脉介入手术,让人体“发动机”恢复“供油”
国产机器人 冠脉介入手术 海军军医大学附属长海医院
font style='font-size:12px;'>
2023/1/4
近日,在海军军医大学附属长海医院心内科病房内,刚刚做完手术的65岁的陈先生对着老伴儿感叹道:“我这台‘发动机’,总算是又供上‘油’了。我也是国内第一人了!”