
搜索结果: 76-90 共查到“知识库 控制科学与技术”相关记录6779条 . 查询时间(2.453 秒)
中国自动化学会第十一届理事会常务理事选举条例
中国自动化学会 第十一届理事会 常务理事 选举条例
font style='font-size:12px;'>
2022/12/31
根据《中国科学技术协会全国学会组织通则(试行)》、《中国自动化学会章程》规定,为确保中国自动化学会理事会常务理事按照民主程序选举产生,特制定本条例。
中国自动化学会第十一届理事会理事选举条例
中国自动化学会 第十一届理事会 理事选举 条例
font style='font-size:12px;'>
2022/12/31
根据《中国科学技术协会全国学会组织通则(试行)》、《中国自动化学会章程》规定,为确保中国自动化学会理事会理事按照民主程序选举产生,特制定本条例:理事会是全国自动化会员代表大会的执行机构,理事会对全国会员代表大会负责。在全国会员代表大会闭会期间,理事会领导学会工作。理事会每届为五年。
中国自动化学会会士实施细则(试行)
中国自动化学会 会士 实施细则 试行
font style='font-size:12px;'>
2022/12/31
为表彰对自动化、智能化和信息化科学与技术的发展做出卓越贡献或为CAA服务做出突出贡献的CAA会员,根据《中国自动化学会章程》和《中国自动化学会会员条例》等相关规定,特制定本实施细则。
中国自动化学会会员条例
中国自动化学会 会员 条例
font style='font-size:12px;'>
2022/12/31
为加强中国自动化学会(以下简称学会)会员与学会各级组织之间的联系,规范学会会员发展、服务、管理工作,履行会员的权利与义务,使学会各级组织更好地为会员服务,会员更好地发挥作用,根据中国科学技术协会《全国学会组织通则》和《中国自动化学会章程》(以下简称《章程》)之规定,特制定本条例。
中国自动化学会理事工作条例
中国自动化学会 理事 工作条例
font style='font-size:12px;'>
2022/12/31
为落实民政部、中国科学技术协会关于社会团体组织管理工作的各项要求,强化中国自动化学会理事会(以下简称理事会)及领导层的职能,明确责权、规范程序、提高效率,特制定本条例。
本学会中文名称为中国自动化学会(以下简称本学会),英文译名为“CHINESE ASSOCIATION OF AUTOMATION”,英文缩写“CAA”。
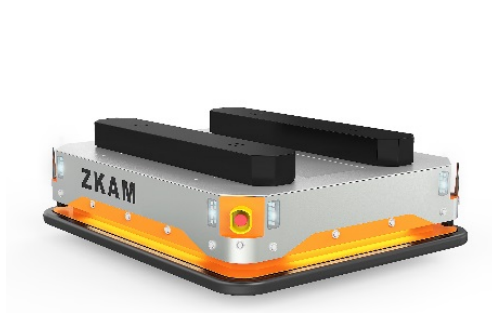
中国科学院宁波材料技术与工程研究所先进制造技术研究所成果:全向移动机器人(图)
先进制造技术研究所 成果 移动机器人
font style='font-size:12px;'>
2023/3/27
本项目创新设计了一种基于解耦式主动万向脚轮的全向移动机器人,可实现0-360°的无滑转滑移的运动,与传统移动式机器人相比,其具有无转弯半径且灵活高效的优势。围绕全向移动式机器人,精密驱动与智能机器人技术团队掌握了相关的高效直驱电机设计技术、高性能直驱电机驱动控制及底层运动控制技术和机器人定位导航等核心关键技术,拥有核心技术知识产权,可根据需求进行定制化。在机器人与智能制造装备技术的市场需求日益增长...
22个复杂适应系统(CAS)属性在研究中被识别出来。确定用于促进特定复杂系统特性的人工生命范式显示了每种特性最常见的范式。
人工生命的建模和分析方法
人工生命 建模 分析
font style='font-size:12px;'>
2022/12/30
在主要研究中发现了10种独特的建模方法。57.4%的主要研究采用基于主体的建模(ABM,Agent-based Modelling)作为建模范式。ABM模拟了自主主体的行动与互动,目的是评估这些互动的全系统结果。元胞自动机(CA,Cellular Automata)是第二种最常使用的建模方法,有45.2%的主要研究使用这种方法。元胞自动机由单元格(通常是二维)组成,每个单元格都被设定为一个特定的状...
人工生命(artificial life)是通过仿真建模、机器技术和生物化学等方式模拟自然生命系统,进而研究生命过程及其演变的领域。针对人工生命的研究范式近年来层出不穷,但捕捉人工生命的关键特征如自组织、涌现、适应、模块化、临界性等特征,则需要采用复杂系统的研究范式。本文梳理了2008年-2018年上百篇复杂系统视角的人工生命研究综述,从中提取出生物范式、社会范式、混合范式及复杂系统范式共93种,...
未来智能医健之路――数基生命系统
智能医健 数基生命 张学工
font style='font-size:12px;'>
2022/12/30
数基生命是由清华大学张学工教授于2020年首次提出,开创了生命与健康研究的新范式,也为未来智能医健提供了新的解决方案。

机械臂运动学反问题的闭形式解取得进展(图)
机械臂运动学 反问题 闭形式解
font style='font-size:12px;'>
2023/1/5
机械臂是目前应用最广的工业机器人。冗余机械臂是一类更加灵活、更适用于人机合作的工业机械臂,其运动学反问题与奇异性是机器人控制过程中的基础问题。数学机械化实验室李子佳副研究员与奥地利乔安娜研究所的Hofbaur教授等人合作,给出了一类冗余机械臂的运动学反问题的闭形式解。他们利用Gr?bner基等工具给出了详尽的机械臂运动奇异性分析。相关工作被机器人顶级期刊IEEE Transactions on R...
中国科学院沈阳自动化研究所机器人学国家重点实验室重点研究方向
中国科学院沈阳自动化研究所机器人学国家重点实验室 研究方向 环境适应性机构设计 网络协同与自主控制 智能感知与人机共融 微纳机器人基础科学与系统 智能机器人系统技术与装备
font style='font-size:12px;'>
2022/10/16
中国科学院沈阳自动化研究所机器人学国家重点实验室定位于为我国经济和社会发展、国家安全和重大科学工程提供所需要的机器人技术与系统,研究机器人学基础理论与方法、发展可行技术和平台样机系统,培养和汇聚从事机器人学研究的高水平人才,推动我国机器人技术的可持续发展,建设具有国际先进水平的国家重点实验室。根据这一定位,实验室的研究方向是:面向发展具有感知、思维和动作能力的先进机器人系统,研究机器人学基础理论与...
2021年度中国智能交通协会科学技术奖-城市交通领域获奖项目介绍
中国智能交通协会科学技术奖 城市交通 项目介绍
font style='font-size:12px;'>
2022/9/9
2021年度中国智能交通协会科学技术奖-城市交通领域获奖项目。科技进步奖:1、城市交通综合运行体征监测诊断技术与应用;2、城市路网级交通流决策支持与智能管控关键技术及应用;3、端云融合的涉车交通大数据分析与安全防控关键技术及应用;4、城市多模式交通运行状态实时预测与智能管理关键技术及应用;5、微波视频一体化交通智能感知终端研发及产业化应用;6、基于北斗定位系统的城市共享单车智能服务与精细治理关键技...
中国科学院自动化研究所信息公开指南
信息公开 指南 中国科学院自动化研究所
font style='font-size:12px;'>
2022/9/5
为保障公民、法人和其他组织依法获取中国科学院自动化研究所相关信息,进一步增强中国科学院自动化研究所工作透明度,提高公共服务水平,根据《中华人民共和国政府信息公开条例》和《中国科学院信息公开管理办法(试行)》(科发传播字〔2015〕7号),制定本指南。