
搜索结果: 1-2 共查到“理学 Robotics”相关记录2条 . 查询时间(0.049 秒)
中国科学院广州分院三维感知-复杂操作端到端机器人学习新方法(IEEE Transactions on Robotics)(图)
三维 机器人 智能 仿生
font style='font-size:12px;'>
2025/4/15
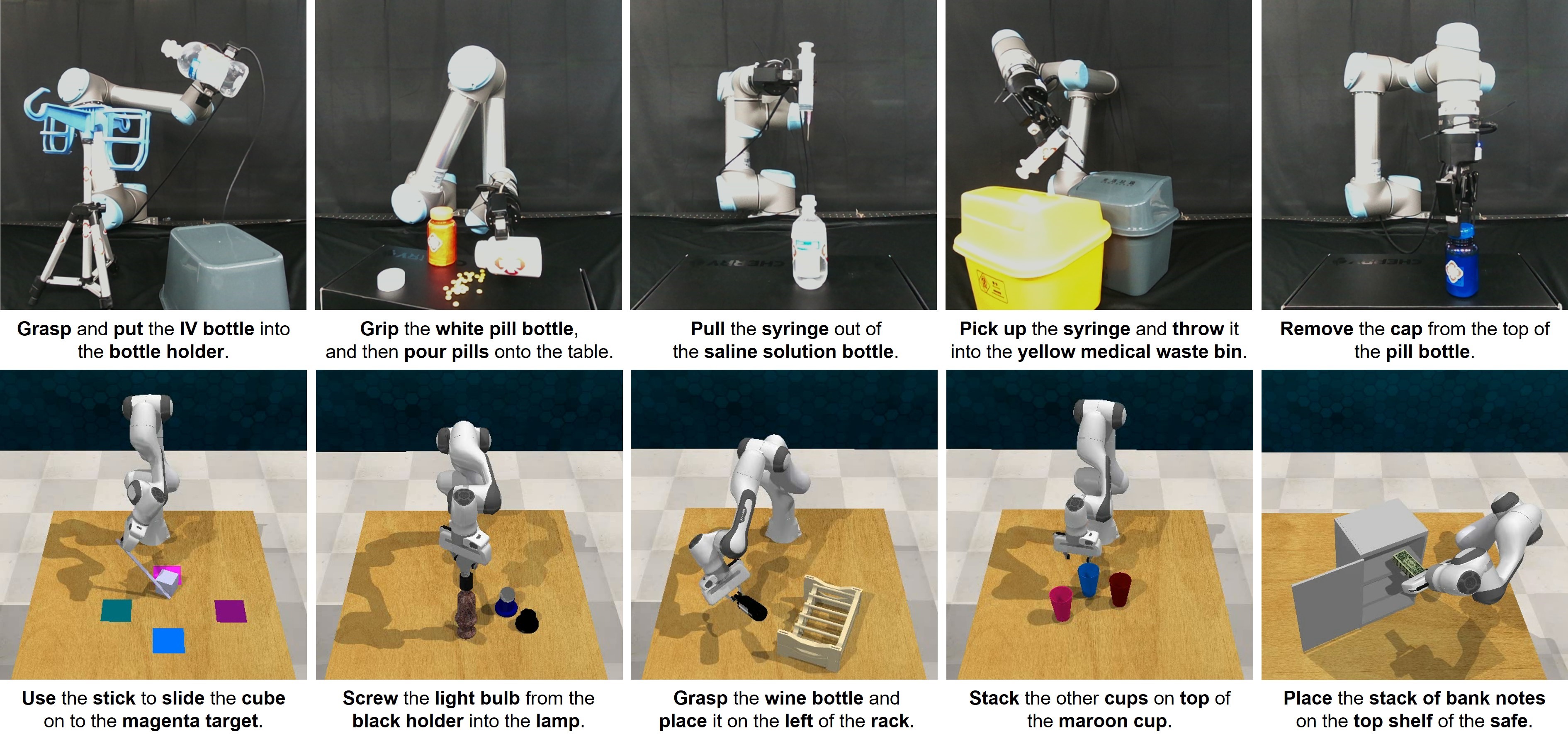
2025年3月26日,中国科学院深圳先进技术研究院集成所智能仿生研究中心徐升团队与澳门大学杨志新团队合作,在机器人学习领域取得突破,提出了一种基于三维视觉融合注意力机制的端到端多模态模型――Fusion-Perception-to-Action Transformer(FP2AT)。该算法通过融合全局与局部体素网格特征,结合本体感知信息,显著提升了机器人在复杂三维场景中的精细操作能力。研究成果以“...