
搜索结果: 1-15 共查到“控制科学与技术 同时”相关记录15条 . 查询时间(0.104 秒)
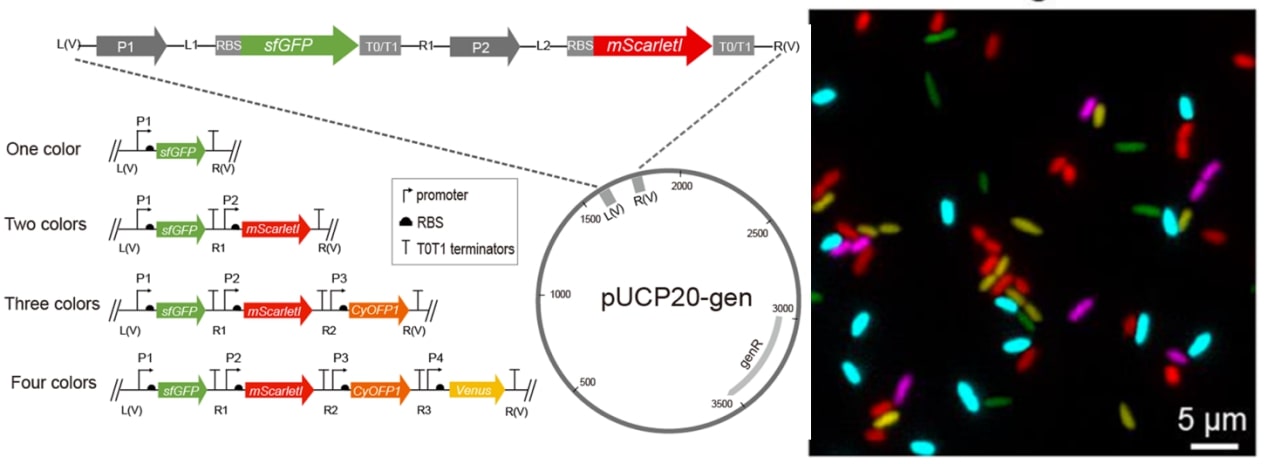
中国科学院深圳先进技术研究院合成所金帆团队在微生物细胞体内实现多色荧光信号的同时成像(图)
荧光蛋白 微生物细胞体 多色荧光信号
font style='font-size:12px;'>
2021/8/27
荧光蛋白的发现革新了生命科学的研究,应用荧光蛋白可以观测到细胞内部的活动,例如荧光蛋白可以标记特定的蛋白,也可以作为报告探针用于检测特定基因的活性。荧光蛋白的开发和进化使其光谱得到了全面的扩展,也使得多个荧光蛋白的同时使用成为可能。
针对一组非线性奇异时滞系统的鲁棒同时保性能控制问题进行研究,用范数有界的不确定参数的微分方程组描述所考虑的系统;基于Lyapunov Krasovskii泛函和线性矩阵不等式方法给出存在同时保性能控制器的充分条件;对具有线性矩阵不等式约束的凸优化问题求解,进而明确给出使得性能指标函数上界达到最优值控制器的表达式;该控制器的设计方法不仅使得奇异时滞闭环系统组正则、无脉冲、同时鲁棒稳定,而且性能函数上...
在套代数框架下, 应用素分解的方法, 设计能同时强镇定两个时变线性系统的稳定控制器, 并给出了所有控制器的参数化. 应用该控制器参数化, 对某类同时鲁棒强镇定问题进行研究, 给出了两个时变线性系统可被同时强鲁棒镇定的充分条件. 针对所得的控制器设计结果给出了数值例子, 数值结果表明了该设计是有效和可行的.
一类多输入非线性系统的同时H∞镇定
非线性系统 干扰抑制 同时H∞ 控制 控制储能函数
font style='font-size:12px;'>
2012/3/16
研究了一类多输入非线性系统同时H∞镇定问题. 提出了可系统地构造公共二次控制储能函数(Control storage function, CSF)的方法. 基于公共二次控制储能函数,设计了可同时H∞镇定闭环系统的连续控制律. 通过一个例子说明了本文所提出方法的有效性.
针对月球探测车位置与姿态的准确估计问题,提出了一种基于RBPF粒子滤波的月球车SLAM方法。该方法基于高速激光雷达对环境地貌的观测,通过激光测距值与所建栅格地图之间的匹配实现。鉴于车体的位置估计仍难以彻底消除累积误差,提出了对于月球车平动速度的估计方法,并通过仿真实验验证了该速度估计方法的正确性。为提高粒子滤波的实时性能,提出所有粒子共同维护一幅地图的处理方法,实验表明该方法在明显提高SLAM实时...
同时镇定一族带有不确定参数的多输入非线性系统
simultaneous stabilization control Lyapunov functions (CLF) state feedback
font style='font-size:12px;'>
2009/9/7
Simultaneous stabilization for a collection of multi-input nonlinear systems with uncertain parameters is dealt with in this paper. A systematic method for obtaining a control Lyapunov function (CLF) ...
严格正则多输入多输出对象同时镇定
同时镇定 代数Riccati不等式(ARI) 静态输出反馈
font style='font-size:12px;'>
2008/12/15
使用逆LQ方法讨论了r个严格正则多输入多输出对象的同时镇定问题,基于矩阵
不等式方法得到了静态输出反馈可同时镇定的充要条件,本文证明,r个对象静态输出反馈同
时镇定等价于r个耦合LQ控制问题的解.然后,基于迭代线性矩阵不等式技术给出了一种
迭代求解方法,并给出了算例.
造纸机不同时滞多变量自校正控制器
不同时滞 多变量自校正控制器
font style='font-size:12px;'>
2008/11/21
本文针对造纸机的纸张定量及水分,研制了具有不同时滞的多变量自校正控制器,增加了
积分器和前馈补偿,用增广最小二乘法估计全部参数,实际运行获得满意的控制效果;还介绍
了微机控制系统的构成及自校正控制系统的调试经验.
基于分布式感知的移动机器人同时定位与地图创建
同时定位与地图创建 分布式感知 Rao-Blackwellized粒子滤波器 随机梯度下降法
font style='font-size:12px;'>
2010/4/8
为了创建大规模环境的精确栅格地图,提出一种基于分布式感知的两层同时定位与地图创建(SLAM)算法.在局部层,机器人一旦进入了一个新的摄像头视野,便依据机器人本体上的激光和里程计信息,采用Rao-Blackwellized粒子滤波方法创建一个新的局部栅格地图.与此同时,带有检测标志的机器人在摄像头视野内以曲线方式运动,以解决该摄像头的标定问题.在全局层,一系列的局部地图组成一个连接图,局部地图间的约...
基于遗传算法的柔性机械臂的同时优化设计
遗传算法 柔性机械臂 同时设计 优化
font style='font-size:12px;'>
2008/7/17
针对单连杆柔性机械臂系统,采用同时设计的方法,对包含柔性机械臂结构参数、传感器参数和控制器参数的系统模型进行整体优化设计,改进的遗传算法用于参数的全局寻优.仿真结果显示,优化设计后的单连杆柔性机械臂为变截面梁,可以仅采用简单的控制器(PD控制器)达到减小梁末端振动的效果.
移动机器人同时定位与地图创建研究进展
同时定位与地图创建 移动机器人 自主导航 地图创建
font style='font-size:12px;'>
2008/7/10
对移动机器人的同时定位与地图创建(Simultaneous Localization and Mapping)的最新研究进行了综述.指出SLAM 面临的问题,介绍了SLAM的基本实现方法.通过对各种改进的SLAM实现方法的性能对比,详尽地分析了如何降低SLAM的复杂度、提高SLAM的鲁棒性等关键技术问题,同时对多机器人协作的SLAM也进行了论述.探讨了SLAM的研究与发展方向....

阿西莫机器人新本领:能同时听3个人讲话(图)
阿西莫机器人
font style='font-size:12px;'>
2008/6/16
北京时间2008年6月12日消息,据英国新科学家杂志报道,近期,日本高级仿生机器人阿西莫(Asimo)又具备了一项新的强大功能――能够倾听3个人同时说话的内容。
目前,阿西莫有能力判断同时来自3个人的声音,预计今后相应的识别软件能够处理更多的语音数量和复杂的语句。阿西莫具有的这项新功能得益于最新设计的软件――HARK,这是由京都大学Hiroshi Okuno和本田研究协会的Kazuhiro...
同时机器人定位与人体跟踪的多源感知协作粒子滤波方法
条件滤波 同时定位与跟踪 多传感器协作粒子滤波
font style='font-size:12px;'>
2010/4/8
提出了分布式多传感器协作的条件粒子滤波算法以解决人与机器人位置的联合概率分布估计问题.全局视觉系统中,各视角独立运行图像平面上基于粒子滤波的目标跟踪,并利用地平面单应关系实现多视角目标主轴同步融合.视觉观测进一步与机器人激光数据以顺序滤波方式异步融合,提出包含人体位置假设的激光似然场模型以提高对机器人位姿误差的鲁棒性,并引入基于Kullback-Leibler距离的自适应采样以降低描述联合分布所需...
基于局部子地图方法的多机器人主动同时定位与地图创建
局部子地图 多机器人协作 主动同时定位与地图创建
font style='font-size:12px;'>
2010/4/8
研究了多机器人在未知环境下以主动的方式协作完成同时定位与地图创建(SLAM)的问题.引入局部子地图方法,由每个机器人建立自身周围局部区域的子地图,使多个机器人之间的地图创建相互独立,从而对全局环境的SLAM问题进行分解.而每个机器人在建立局部子地图时将主动SLAM问题转化为多目标优化问题;机器人选取最优的控制输入,使定位与地图创建的准确性、信息增益以及多机器人之间的协调关系得到综合优化.最后,通过...